





Package Summary
gmcl, which stands for general monte carlo localization, is a probabilistic-based localization technique for mobile robots in 2D-known map. It integrates the adaptive monte carlo localization - amcl - approach with three different particle filter algorithms (Optimal, Intelligent, Self-adaptive) to improve the performance while working in real time.
Main node structure and amcl-algorithms’s code was derived, with thanks, from Brian Gerkey's amcl package.
- Maintainer status: developed
- Maintainer: Mhd Ali Alshikh Khalil <adler1994 AT gmail DOT com>
- Author: Mhd Ali Alshikh Khalil, adler1994@gmail.com
- License: LGPL
- Source: git https://github.com/adler-1994/gmcl.git (branch: master)
Contents
Citation Note
If you are using this package in your research work, please cite our article, more infohere.
Installation
Before installing gmcl package, please install ROS navigation stack in your ROS workspace. You can do that with the following command:
$ sudo apt-get install ros-$ROS_DISTRO-navigation
Then download gmcl package and place it inside the /src folder of your catkin workspace and compile it, which can be done through following commands:
$ cd catkin_ws $ git clone -b master https://github.com/adler-1994/gmcl src/gmcl $ catkin_make
Following video shows gmcl in comparison to amcl while running on the famous turtlebot 3 inside Gazebo simulation in solving the 3 localization problems (Pose Tracking, Global Localization, Kidnapped-robot):
Algorithms
Algorithms could be divided into new and migrated from amcl:
Migrated From amcl
Many of the algorithms and their parameters are well-described in the book Probabilistic Robotics, by Thrun, Burgard, and Fox. The user is advised to check there for more detail. In particular, we use the following algorithms from that book: sample_motion_model_odometry, beam_range_finder_model, likelihood_field_range_finder_model, Augmented_MCL, and KLD_Sampling_MCL.
New Algorithms
Besides algorithms implemented in amcl, gmcl takes advantage of Optimal particle filter as described here and Intelligent particle filter as described here and Self-adaptive particle filter as described here to improve the performance of amcl while working in real time.
Modifications done on new algorithms to integrate them with amcl, Pseudo code of amcl & gmcl algorithms, performance and complexity analysis of amcl & gmcl are well-described in article here.
Package Requirements
In order to localize a mobile robot inside a map using gmcl package, following must be represented:
Complete TF Tree
The robot state publisher node – more info here– must be running with ~robot_description param of the robot’s urdf and publishes the tf of robots links (base link and lasers links). In addition, a motion controller should publish the estimated robot motion as a transform between the odometry frame (~odom_frame_id) and the base frame (~base_frame_id).
Occupancy Grid Map
A map server node –more info here– must publish a valid map using correct YAML format.
Laser Scans
Robot must be equipped with at least one laser scanner. All lasers must be fixed in place with respect to the robot base because gmcl looks up the transform between the laser's frame (~laser_frame_id) and the base frame (~base_frame_id), and latches it forever. So gmcl ”cannot” handle a laser that moves with respect to the base. All lasers should publish their scans as (sensor_msgs/LaserScan) massege.
Examples
Example of launch file that runs gmcl node and its parameters on Differential drive mobile robot
../gmcl/examples/gmcl_diff.launch
To run gmcl node with initial estimated pose e.g. at (x, y, yaw) := (-1, 2, 0.6)
$ rosrun gmcl gmcl_diff.launch initial_pose_x:=-1 initial_pose_y:=2 initial_pose_a:=0.6
Example of launch file that runs gmcl node and its parameters on Holonomic wheeled mobile robot
../gmcl/examples/gmcl_omni.launch
To run gmcl node with initial estimated pose e.g. at (x, y, yaw) := (-1, 2, 0.6)
$ rosrun gmcl gmcl_omni.launch initial_pose_x:=-1 initial_pose_y:=2 initial_pose_a:=0.6
gmcl Node
Just like amcl, gmcl takes in a laser-based map, laser scans, and transform messages, and outputs pose estimates. On startup, gmcl initializes its particle filter according to the parameters provided. Note that, because of the defaults, if no parameters are set, the initial filter state will be a moderately sized particle cloud centered about (0,0,0). The drawing below shows localization using gmcl. During operation gmcl estimates the transformation of the base frame (~base_frame_id) in respect to the map frame (~global_frame_id) but it only publishes the transform between map frame and the odometry frame (~odom_frame_id). Essentially, this transform accounts for the drift that occurs using Dead Reckoning. 
Subscribed Topics
scan (sensor_msgs/LaserScan)
- Laser scans.
tf (tf/tfMessage)
- Transforms.
initialpose (geometry_msgs/PoseWithCovarianceStamped)
- Mean and covariance with which to (re-)initialize the particle filter.
map (nav_msgs/OccupancyGrid)
- When the ~use_map_topic parameter is set, gmcl subscribes to this topic to retrieve the map used for laser-based localization.
Published Topics
gmcl_pose (geometry_msgs/PoseWithCovarianceStamped)
- Robot's estimated pose in the map, with covariance.
gmcl_particlecloud (geometry_msgs/PoseArray)
- The set of pose estimates being maintained by the filter.
gmcl_SER (geometry_msgs/PoseArray)
- The set of poses that shape Similar Energy Region (SER).
tf (tf/tfMessage)
- Publishes the transform from odom (which can be remapped via the ~odom_frame_id parameter) to map.
Services
global_localization (std_srvs/Empty)
- Initiate global localization, wherein all particles are dispersed randomly through the free space in the map if ~use_self_adaptive is set to false, otherwise particles will be dispersed randomly in SER.
request_nomotion_update (std_srvs/Empty)
- Service to manually perform update and publish updated particles.
set_map (nav_msgs/SetMap)
- Service to manually set a new map and pose.
Services Called
static_map (nav_msgs/GetMap)
- gmcl calls this service to retrieve the map that is used for laser-based localization; startup blocks on getting the map from this service.
Parameters
Besides Parameters that amcl uses to configure its node –Please check them– , gmcl adds eleven Parameters to overall filter parameters to configure the gmcl node and they are:
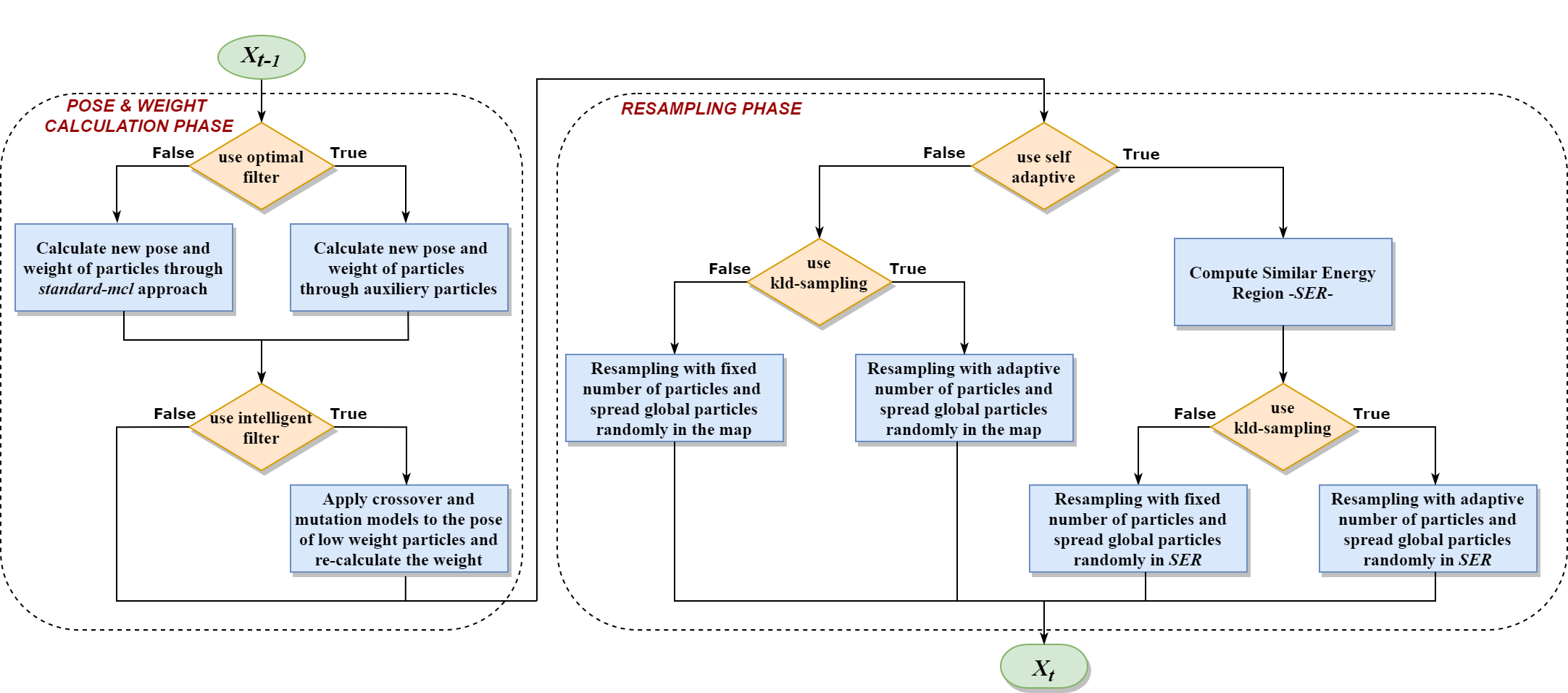
~use_optimal_filter (bool, default: false (disabled))
- When set to true, gmcl will compute new pose and weight of particles through auxiliary particles of the optimal filter, otherwise it will compute pose and weight through standard-MCL approach.
~use_intelligent_filter (bool, default: false (disabled))
- When set to true, gmcl will crossover and mutate the pose of one third of small weight particles through crossover and mutation models.
~use_self_adaptive (bool, default: false (disabled))
- When set to true, gmcl will spread global particles randomly in SER, otherwise it will spread global particles randomly in free space of the map.
~use_kld_sampling (bool, default: true)
- When set to true, gmcl will adapt the number of its particles, Otherwise it will fix the number of particles to parameter ~max_particles.
Previous parameters define the Flow of gmcl algorithm and can be seen in following drawing…..  Full size available here.
Full size available here.
The following table shows name of different techniques based on filters implemented, it could be seen that gmcl works with default parameters same as amcl….. 
~N_aux_particles (int, default: 10)
- Defines the number of auxiliary particles. Used in Optimal particle filter.
Real Time Caution
Be careful when setting the number of auxiliary particles, since they increase linearly the time required to calculate the new pose and weight of filter’s particles…..more details in article.
~crossover_alpha (double, default: 0.5)
- Specifies the amount of effect that pose of large weight particle does to pose of small weight particle. Used in crossover model in Intelligent particle filter.
~mutation_probability (double, default: 0.1)
- Specifies the occurrence probability of a mutation to pose of small weight particle. Used in mutation model in Intelligent particle filter.
~energy_map_resolution_x (double, default: 0.2 meters)
- X-axis resolution of energy map. Used in Self-Adaptive particle filter.
~energy_map_resolution_y (double, default: 0.2 meters)
- Y-axis resolution of energy map. Used in Self-Adaptive particle filter.
Carsh Warning
Don’t set either of energy_map_resoluation_x or -resoultion_y to zero or gmcl node won’t execute.
~energy_threshold_value (double, default: 0.05)
- Defines the upper limit in energy difference between energy map cells and sensor reading’s energy to shape SER. Used in Self-Adaptive particle filter.
~publish_ser (bool, default: false)
- When set to true, gmcl will display SER in Rviz as a (geometry_msgs/PoseArray) massege.
Feedback
To report a bug, or suggest an enhancement, please create a Github issue here.
If you already have enhanced the code and want to add your changes to the main code, please send a Github pull request through your forked copy of gmcl repository for merging. If you are not familiar with pull requests please visit page.
If you have a question, please post it on ROS answers, make sure your question is tagged by gmcl so I get notified.
Acknowledgements & Citation
This package was written during my master's thesis at Tishreen University, Syria. My thesis advisor is Dr.Iyad Hatem. 
This work has been published as an article here. To properly cite it, please use the following:
@article{article,
author = {Alshikh Khalil, Mhd Ali and Hatem, Iyad},
issue = {Vol. 43 No. 6 (2021)},
pages = {119-137},
title = {Development of a New Technique in ROS for Mobile Robots Localization in Known-Based 2D Environments},
journal = {Tishreen University Journal of Research and Scientific Studies - Engineering Sciences Series}}
{kind=link}